








PLEASE SELECT THE DESTINATION COUNTRY AND LANGUAGE :
Me Stepper Motor Driver v1.0
(해외배송 가능상품)| 상품명 | Me Stepper Motor Driver v1.0 |
|---|---|
| 판매가 | 40,455원 VAT 별도 |
| 상품가 | 40,455원 |
| 부가세 | 4,045원 |
| 배송방법 | 택배 |
| 배송비 | 2,800원 (100,000원 이상 구매 시 무료) |
| 수량 |   |
| SNS Share |
|---|

| 옵션 선택 |
(최소주문수량 1개 이상 / 최대주문수량 0개 이하)
사이즈 가이드이벤트
DETAIL
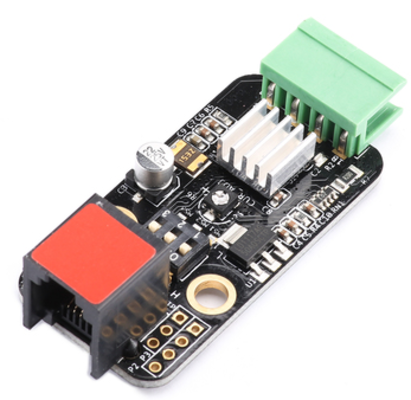
Me Stepper Driver
Overview
The Me Stepper Motor Driver module is designed to precisely drive the bipolar stepper motor. When pulse signals are input into the stepper motor, it rotates step by step. For each pulse signal, it rotates a certain angle. This module features adjustable drive current and microstepping hardware adjustment. It can be used in 3D printing, numerical control, Makeblock music robot, precise motion control, etc. Its red ID means that it should be connected to the port with red ID on Makeblock Orion by RJ25 wire.
Technical specifications
● Drive voltage: 6V-12V DC
● Maximum current: 1.35A
● Dimension: 51 x 24 x 18mm (L x W x H)
Functional characteristics
● Compatible with 4-wire bipolar stepper motor
● Simply two I/O ports to control stepping and direction
● Provide an adjustable potentiometer to adjust current and change the torque of stepper motor
● Provide onboard DIP switch to support the full, half, 1/4, 1/8, 1/16 stepping mode
● Provide grounding short-circuit protection and loading short-circuit protection
● Anti-reverse protection – connecting the power supply inversely will not damage IC
● White area of module is the reference area to contact metal beams
● Support mBlock GUI programming, and applicable to users of all ages
● Adopt RJ25 port for easy connection
● Provide pin-type port to support most development boards including Arduino series
Pin definition
The port of Me Stepper Motor Driver has seven pins, and their functions are as follows:
Wiring mode
● Connecting with RJ25
Since the port of Me Stepper Motor Driver has red ID and the module is motor drive, you need to connect the port with red ID on Makeblock Orion when using RJ25 port.
Taking Makeblock Orion as example, you can connect it to ports No. 1 and 2 as follows:
● Connecting with Dupont wire
When the Dupont wire is used to connect the module to the Arduino UNO Baseboard, its pin EN should be connected to low level, RST and SLP should be connected to high level, STP and DIR should be connected to digital ports (also can only be connected with STP and DIR pins) as follows:
Guide to programming
● Arduino programming
If you use Arduino to write a program, the library Makeblock-Library-master should be invoked to control the Me Stepper Motor Driver. This program serves to make the motor rotating on demand through Arduino programming. (Input an integer between 0 to 4 on the serial port control tab and send it out).
● mBlock programming
Me Stepper Motor Driver supports the mBlock programming environment and its instructions are introduced as follows:
This is an example on how to use mBlock to control the Me Stepper Motor Driver module. mBlock can make the stepper motor rotating from lower speed to higher speed again and again.
Principle analysis
Stepping motor is a kind of electromagnetic device to transform pulse signal into corresponding angular displacement or linear displacement. It is a special kind of motor.
Rotation of general motor is continuous, but stepper motor has two basic states – positioning and operating. When pulse signals are input to the stepper motor, it rotates step by step. For each pulse signal, it rotates a certain angle.
The main component of Me Stepper Motor Driver module is A4988 micro-step driver which is designed to operate the bipolar stepper motor in such stepping modes as Full, Half, 1/4, 1/8, and 1/16 step. When it is used, simply control the STEP and DIR. For example, when in the Full stepping mode, the motor should rotate a circle by 200 steps (i.e. 1.8° per step). If higher accuracy is required, we can choose other mode. For example, we choose the 1/4 stepping mode (that is, 0.45° per step), and then the motor should rotate by 800 micro steps to complete a round.
The stepping mode table of this module:
The module has a potentiometer which can be used to adjust the torque of motor, However,over-torquing may burn the chip due to heat dissipation,so it’s not recommended adjusting the torque to too large.
Schematic
상품결제정보
고액결제의 경우 안전을 위해 카드사에서 확인전화를 드릴 수도 있습니다. 확인과정에서 도난 카드의 사용이나 타인 명의의 주문등
정상적인 주문이 아니라고 판단될 경우 임의로 주문을 보류 또는 취소할 수 있습니다.
무통장 입금은 상품 구매 대금은 PC뱅킹, 인터넷뱅킹, 텔레뱅킹 혹은 가까운 은행에서 직접 입금하시면 됩니다.
주문시 입력한 입금자명과 실제입금자의 성명이 반드시 일치하여야 하며, 7일 이내로 입금을 하셔야 하며 입금되지 않은 주문은 자동취소 됩니다.
무통장 입금은 상품 구매 대금은 PC뱅킹, 인터넷뱅킹, 텔레뱅킹 혹은 가까운 은행에서 직접 입금하시면 됩니다.
주문시 입력한 입금자명과 실제입금자의 성명이 반드시 일치하여야 하며, 7일 이내로 입금을 하셔야 하며 입금되지 않은 주문은 자동취소 됩니다.
배송정보
- 배송 방법 : 택배
- 배송 지역 : 전국지역
- 배송 비용 : 2,800원
- 배송 기간 : 3일 ~ 7일
- 배송 안내 : - 산간벽지나 도서지방은 별도의 추가금액을 지불하셔야 하는 경우가 있습니다.
고객님께서 주문하신 상품은 입금 확인후 배송해 드립니다. 다만, 상품종류에 따라서 상품의 배송이 다소 지연될 수 있습니다.
교환 및 반품정보
교환 및 반품 주소
- [38066] 경상북도 경주시 석장동 707 동국대학교경주캠퍼스 산학협력관 307호
교환 및 반품이 가능한 경우
- 상품을 공급 받으신 날로부터 7일이내 단, 가전제품의
경우 포장을 개봉하였거나 포장이 훼손되어 상품가치가 상실된 경우에는 교환/반품이 불가능합니다.
- 공급받으신 상품 및 용역의 내용이 표시.광고 내용과
다르거나 다르게 이행된 경우에는 공급받은 날로부터 3월이내, 그사실을 알게 된 날로부터 30일이내
교환 및 반품이 불가능한 경우
- 고객님의 책임 있는 사유로 상품등이 멸실 또는 훼손된 경우. 단, 상품의 내용을 확인하기 위하여
포장 등을 훼손한 경우는 제외
- 포장을 개봉하였거나 포장이 훼손되어 상품가치가 상실된 경우
(예 : 가전제품, 식품, 음반 등, 단 액정화면이 부착된 노트북, LCD모니터, 디지털 카메라 등의 불량화소에
따른 반품/교환은 제조사 기준에 따릅니다.)
- 고객님의 사용 또는 일부 소비에 의하여 상품의 가치가 현저히 감소한 경우 단, 화장품등의 경우 시용제품을
제공한 경우에 한 합니다.
- 시간의 경과에 의하여 재판매가 곤란할 정도로 상품등의 가치가 현저히 감소한 경우
- 복제가 가능한 상품등의 포장을 훼손한 경우
(자세한 내용은 고객만족센터 1:1 E-MAIL상담을 이용해 주시기 바랍니다.)
※ 고객님의 마음이 바뀌어 교환, 반품을 하실 경우 상품반송 비용은 고객님께서 부담하셔야 합니다.
(색상 교환, 사이즈 교환 등 포함)
- [38066] 경상북도 경주시 석장동 707 동국대학교경주캠퍼스 산학협력관 307호
교환 및 반품이 가능한 경우
- 상품을 공급 받으신 날로부터 7일이내 단, 가전제품의
경우 포장을 개봉하였거나 포장이 훼손되어 상품가치가 상실된 경우에는 교환/반품이 불가능합니다.
- 공급받으신 상품 및 용역의 내용이 표시.광고 내용과
다르거나 다르게 이행된 경우에는 공급받은 날로부터 3월이내, 그사실을 알게 된 날로부터 30일이내
교환 및 반품이 불가능한 경우
- 고객님의 책임 있는 사유로 상품등이 멸실 또는 훼손된 경우. 단, 상품의 내용을 확인하기 위하여
포장 등을 훼손한 경우는 제외
- 포장을 개봉하였거나 포장이 훼손되어 상품가치가 상실된 경우
(예 : 가전제품, 식품, 음반 등, 단 액정화면이 부착된 노트북, LCD모니터, 디지털 카메라 등의 불량화소에
따른 반품/교환은 제조사 기준에 따릅니다.)
- 고객님의 사용 또는 일부 소비에 의하여 상품의 가치가 현저히 감소한 경우 단, 화장품등의 경우 시용제품을
제공한 경우에 한 합니다.
- 시간의 경과에 의하여 재판매가 곤란할 정도로 상품등의 가치가 현저히 감소한 경우
- 복제가 가능한 상품등의 포장을 훼손한 경우
(자세한 내용은 고객만족센터 1:1 E-MAIL상담을 이용해 주시기 바랍니다.)
※ 고객님의 마음이 바뀌어 교환, 반품을 하실 경우 상품반송 비용은 고객님께서 부담하셔야 합니다.
(색상 교환, 사이즈 교환 등 포함)
-
INFORMATION
- 상호명 : 창의융합과학(주)
- 대표자(성명) : 이효선
- 주소 :경북 경주시 동대로 123 산학협력관 307호
- 대표전화 :1577-5483
- 팩스 :043-288-6494
-
LICENCE
- 사업자등록번호 : 141-87-00641 141-87-00641
- 통신판매신고번호 :제2018경북경주-0057
-
WEB MASTER
- e-mail:sun40500@naver.com
- 개인정보보호정책 책임자 : 이효선
-
BANK INFO
- 은행명 : 신한은행
- 계좌번호 : 100-032-029483
- 예금주 : 창의융합과학(주)
